


| Россия, Волгоградская область |
Инспектор
Вы можете этот курс.
Опубликован: 10.10.2014 | Уровень: для всех | Доступ: платный | ВУЗ: Московский государственный университет путей сообщения
Лекция 7:
Машинное обучение
7.2. Мичиганский подход
Здесь системы классификации используют структуру, в которой популяция правил закодирована в строки битов и развивается и совершенствуется на основе меняющихся входных данных, поступающих из внешней среды [1,2]. Система "обучается" на представленных входных данных по методу обучения с учителем, где для каждого набора входных данных известны правильные значения выходов. Правила в системе классификации формируют популяцию из особей, развивающихся во времени. Система классификации, представленная на рис. 7.1 состоит из следующих компонентов:
- датчик и исполнительный элемент;
- система обмена сообщениями (входные, выходные и внутренние списки сообщения);
- система правил (популяция классификаторов);
- система оценки эффективности и отбора правил ("бригадный алгоритм");
- генетический алгоритм (репродукция классификаторов).
Среда (внешнее окружение системы классификации) посылает сообщение, которое принимается датчиками системы классификации и помещается во входной список сообщений. Датчики декодируют сообщение в одно или более (декодированных) сообщений и размещают его во внутренний список сообщений. Эти сообщения активизируют классификаторы. Наиболее сильные из активизированных классификаторов размещают сообщения в списке внутренних сообщений. Эти новые сообщения могут активизировать другие классификаторы, или послать некоторые сообщения в выходной список сообщений. В последнем случае, исполнительные элементы системы классификации кодируют их в выходные сообщения, которые возвращаются во внешнюю среду. Среда оценивает действие системы посредством обратной связи с помощью "бригадного алгоритма", который модифицирует "силу" классификаторов [1,2].
Далее рассмотрим более подробно некоторые из этих действий. Сначала определим некоторые базовые понятия. Каждый классификатор состоит из двух частей: 1-я часть условие, и 2-я сообщение. "Условная часть" правила представляет собой конечную строку символов из некоторого алфавита. Здесь алфавит включает "неопределенный" символ "*". Часть, представляющая сообщение, является конечной строкой из символов того же самого алфавита, кроме символа "*".
Далее мы будем использовать (шуточный) пример классификации роботов [5]. Пусть каждый робот описывается шестью атрибутами, которые могут принимать следующие значения, представленные в таблице 7.1.
| Атрибуты | Значение Атрибутов: |
|---|---|
| Форма Головы | Округлая, Квадратная, Восьмиугольная |
| Форма Тела | Округлая, Квадратная, Восьмиугольная |
| Улыбка | Да, Нет |
| Держит в руках | Сабля, Шарик, Флаг |
| Цвет куртки | Белый, Жёлтый, Зелёный, Синий, Красный |
| Шарф | Да, Нет |
Здесь жирные буквы используются для идентификации атрибутов и их значений. Например, (Ц=Ж) означает "Цвет_Куртки = Жёлтый". Приведем примеры описаний концепций  (классов или видов) роботов:
(классов или видов) роботов:
-
 - голова округлая и куртка белая, или голова квадратная и держит шарик;
- голова округлая и куртка белая, или голова квадратная и держит шарик; -
 - улыбается и держит шарик, или голова округлая;
- улыбается и держит шарик, или голова округлая; -
 - улыбается и не держит саблю;
- улыбается и не держит саблю; -
 - куртка белая и не носит шарф, или голова круглая и улыбается;
- куртка белая и не носит шарф, или голова круглая и улыбается; -
 - улыбается и держит шарик или саблю.
- улыбается и держит шарик или саблю.
Здесь каждая концепция описана в терминах этих шести атрибутов и их значений. Формальное описание концепций представлено на языке  (упрощенная версия распространенного языка Variable Valued Logic Systems), описывающем входные события в пространстве атрибутов.
(упрощенная версия распространенного языка Variable Valued Logic Systems), описывающем входные события в пространстве атрибутов.
Описание концепции  представляется в виде дизъюнкции комплексов
представляется в виде дизъюнкции комплексов

При этом каждый комплекс выражен посредством конъюнкции селекторов, которые являются триплетами (например, (Ц=Ж) для "Цвет куртки = Желтый").
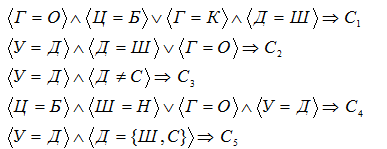
Концепции  могут быть выражены следующим образом:
могут быть выражены следующим образом:
Каждому классификатору приписывается "сила", характеризующая его "важность"."Сила" важна в процессе "торговли", где классификаторы конкурируют за право послать сообщения. Мы можем представить решающее правило с помощью одного или более классификаторов. Каждый классификатор имеет следующую форму  , где
, где  обозначает значение
обозначает значение  -го атрибута
-го атрибута  для областей значений, описанных выше.
для областей значений, описанных выше.
Например, классификатор, (О * * * Б *): представляет следующее правило: "Если голова Округлая и куртка Белая, то робот соответствует концепции ". Здесь концепция фактически соответствует классу, к которому принадлежит робот.
Чтобы упростить пример, предположим, что система обучается единственной концепции . Но рассматриваемый метод может быть легко обобщен для обработки множественных концепций. В случае одной концепции каждый классификатор имеет следующую форму , где  (принадлежность к концепции ) или
(принадлежность к концепции ) или  (в противном случае).
(в противном случае).
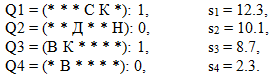
Предположим, что на некоторой стадии процесса обучения в системе имеется небольшая (случайная) популяция классификаторов  . При этом каждый классификатор имеет свою силу
. При этом каждый классификатор имеет свою силу  . Пусть для определенности в нашем примере на текущий момент присутствуют следующие классификаторы:
. Пусть для определенности в нашем примере на текущий момент присутствуют следующие классификаторы:
Предположим далее, что из внешней среды поступает новое входное сообщение  (ООДСБН). Оно представляет описание одного робота с округлой головой (О), округлым телом (О), который улыбается (Д), держит саблю (С) и одет в белую (Б) куртку без шарфа (Н). Очевидно, этот робот вписывается (соответствует) в концепцию из-за его округлой головы и белой куртки.
(ООДСБН). Оно представляет описание одного робота с округлой головой (О), округлым телом (О), который улыбается (Д), держит саблю (С) и одет в белую (Б) куртку без шарфа (Н). Очевидно, этот робот вписывается (соответствует) в концепцию из-за его округлой головы и белой куртки.
Анализ показывает, что это сообщение активизирует три классификатора:  . Эти классификаторы "торгуются": предложение каждого классификатора в торге пропорционально его силе
. Эти классификаторы "торгуются": предложение каждого классификатора в торге пропорционально его силе  . Самый сильный классификатор
. Самый сильный классификатор  выигрывает и посылает свое сообщение. Так как сообщение дает правильную классификацию, этот классификатор получает премию
выигрывает и посылает свое сообщение. Так как сообщение дает правильную классификацию, этот классификатор получает премию  . Тогда сила классификатора становится равной:
. Тогда сила классификатора становится равной:

Если бы сообщение дало неправильный ответ, "премия" r была бы отрицательна. Конкретно для коэффициентов  и
и  , новая сила классификатора составляет
, новая сила классификатора составляет  .
.
Одним из основных параметров системы классификаторов является период ГА  , который определяет число временных шагов (число циклов описанных выше) между запросами ГА. Конечно, может быть константой, генерируемой произвольно (со средним значением, равным ), или вообще не определенно, и этот выбор может быть сделан, исходя из характеристик работы системы. Так или иначе, предположим, что настало время для применения генетического алгоритма в классификации.
, который определяет число временных шагов (число циклов описанных выше) между запросами ГА. Конечно, может быть константой, генерируемой произвольно (со средним значением, равным ), или вообще не определенно, и этот выбор может быть сделан, исходя из характеристик работы системы. Так или иначе, предположим, что настало время для применения генетического алгоритма в классификации.
В данном подходе сила классификаторов рассматривается в качестве значений фитнесс-функции и при выборе родителей здесь используется пропорциональный отбор (колесо рулетки).
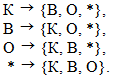
Далее используются стандартные генетические операторы: репродукция, мутация и кроссинговер. Однако их необходимо несколько модифицировать. Рассмотрим, например, первый атрибут. Его областью (форма головы) является {О, К, В, *}. Поэтому, при мутации, мы заменяем изменяемое значение на любое из трех других значений (с равной вероятностью):
После выполнения оператора мутации сила потомка обычно остаётся такой же, как и у родительской особи. Оператор кроссинговера в данном случае не требует никакой модификации (то есть применяется классический ОК). Этому способствует также тот факт, что все классификаторы имеют равную длину. Далее, применив кроссинговер к двум родителям, например, и  , получим:
, получим:
Случайным образом генерируется номер позиции для кроссинговера (например, как показано, после третьего символа), и получаем следующий результат (особи - потомки):
При кроссинговере сила полученных классификаторов определяется как среднее значение (возможно взвешенное) от значений силы родителей.
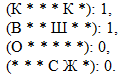
Далее процесс обучения продолжается: принимаются новые положительные и отрицательные сообщения из внешней среды, производится "торг" и модифицируются "силы" классификаторов. Можно показать, что в конечном счете популяция классификаторов сходится к некоторому числу сильных особей (классификаторов), например,
Приведенный пример является, конечно, искусственным и предназначен для иллюстрации основных принципов обучения, используемых в Мичиганском подходе. Следует отметить, однако, что при "торге" в примере использовалась самая простая система оценок эффективности классификаторов. Существуют и более сложные (и эффективные) методы оценки классификаторов.