Лекция 1:
Основные понятия теории абстрактных автоматов
1.2. Методы задания автоматов
Для задания конечного автомата S требуется описать все элементы множества

наиболее часто используемой формой описания элементов множества S используется табличный, графический, матричный способы.
Теоретико-множественное представление автоматов.
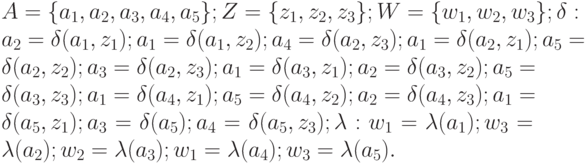
Для задания конечного автомата  все элементы множества должны быть заданы явно. Так для автомата Мили:
все элементы множества должны быть заданы явно. Так для автомата Мили:
 -
-  - выходной
- выходной  -
- 

 - начальное состояние автомата.
- начальное состояние автомата.
Например, автомат Мили  , представленный в табл.1.3 в явной форме описывается так:
, представленный в табл.1.3 в явной форме описывается так:

Автомат Мура  , представленный в табл.1.8 в явной форме описывается так:
, представленный в табл.1.8 в явной форме описывается так:
Табличная форма.
Табличная форма для автомата Мили иллюстрируется табл.1.1 (переходов) и табл.1.2 (выходов).








Строки этих таблиц соответствуют входным сигналам, а столбцы - состояниям, причем крайний левый столбец обозначен начальным состоянием  . На пересечении столбца
. На пересечении столбца  и строки
и строки  …. в таблице переходов ставится функция перехода
…. в таблице переходов ставится функция перехода  , то есть состояние, в которое автомат переходит из состояния под действием входного сигнала
, то есть состояние, в которое автомат переходит из состояния под действием входного сигнала  а в таблице выходов - выходная функция
а в таблице выходов - выходная функция  , то есть соответствующий этому переходу выходной сигнал
, то есть соответствующий этому переходу выходной сигнал  .
.
Пример табличного способа задания автомата Мили показан в табл. 1.3 (переходов) и табл. 1.4 (выходов).
Автомат называется частично заданным, если он определен не для всех пар переходов (  ). Для частично заданного автомата на месте отсутствующего перехода ставится прочерк как в таблице переходов, так и в таблице выходов.
). Для частично заданного автомата на месте отсутствующего перехода ставится прочерк как в таблице переходов, так и в таблице выходов.
Пример табличного способа задания частичного автомата показан в табл.1.5 (переходов) и табл.1.6 (выходов).
Табличная форма задания автомата Мура представляет собой совмещенную табл.1.7, в которой выходной сигнал, соответствующий состоянию в автомате Мура размещен в верхней строке над соответствующими состоянием, а остальная информация аналогична представлению автомата Мили.
Пример представления автомата Мура приведен в табл.1.8.
| \ wG | w1 | w3 | w2 | w1 | w3 |
|---|---|---|---|---|---|
| zf\ am | a 1 | a2 | a3 | a4 | a5 |
| z1 | a2 | a1 | a1 | a1 | a1 |
| z2 | a3 | a5 | a2 | a5 | a3 |
| z3 | a4 | a3 | a5 | a2 | a4 |
Графовая форма задания абстрактных автоматов
В данном случае автомат  представляется графом, в котором:
представляется графом, в котором:
- множество
 изображено вершинами графа;
изображено вершинами графа; - функция
 задана дугами графа, причем две вершины графа и
задана дугами графа, причем две вершины графа и  , соединяются дугой, если в автомате существует переход из в ;
, соединяются дугой, если в автомате существует переход из в ; - множество
 изображено метками дуг: ставится на дуге из вершины в вершину , если в автомате существует переход из в под действием входного сигнала ;
изображено метками дуг: ставится на дуге из вершины в вершину , если в автомате существует переход из в под действием входного сигнала ; - функция
 задана метками дуг или вершин: для автомата Мили дуга из вершины в вершину помечается выходным сигналом , если в автомате существует переход из в и при этом вырабатывается выходной сигнал ; а для автомата Мура выходным сигналом помечается вершина, определяющая
задана метками дуг или вершин: для автомата Мили дуга из вершины в вершину помечается выходным сигналом , если в автомате существует переход из в и при этом вырабатывается выходной сигнал ; а для автомата Мура выходным сигналом помечается вершина, определяющая 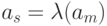 .
.
На рисунке 1.8 приведены примеры описания автомата Мили и автомата Мура:
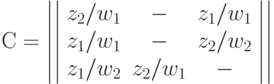
Матричная форма
Для автомата Мили матричная форма состоит из матрицы  размерностью
размерностью  , где каждый элемент матрицы
, где каждый элемент матрицы  стоящий на пересечении
стоящий на пересечении  -ой строки и
-ой строки и  -го столбца соответствует входному сигналу , вызывающему переход из состояния в состояние с выработкой выходного сигнала . Пример матричного описания автомата Мили показан ниже.
-го столбца соответствует входному сигналу , вызывающему переход из состояния в состояние с выработкой выходного сигнала . Пример матричного описания автомата Мили показан ниже.
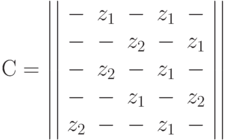
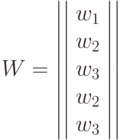
Для автомата Мура матричная форма состоит из матрицы размерностью , где каждый элемент матрицы  , стоящий на пересечении -ой строки и -го столбца, соответствует входному сигналу , вызывающему переход из состояния в состояние
, стоящий на пересечении -ой строки и -го столбца, соответствует входному сигналу , вызывающему переход из состояния в состояние  Так как выходной сигнал . в автомате Мура зависит только от состояния, следовательно, выходные сигналы могут быть представлены матрицей-столбцом. Пример матричного описания автомата Мура показан на формуле, приведенной выше.
Так как выходной сигнал . в автомате Мура зависит только от состояния, следовательно, выходные сигналы могут быть представлены матрицей-столбцом. Пример матричного описания автомата Мура показан на формуле, приведенной выше.