
| Россия |
Опубликован: 21.08.2007 | Уровень: специалист | Доступ: свободно | ВУЗ: Тверской государственный университет
Лекция 4:
Конечные автоматы: преобразователи и распознаватели
Аннотация: Конечные автоматы-преобразователи. Пример: сложение двоичных чисел.
Конечные автоматы-распознаватели. Конечно-автоматные языки. Доказательство
правильности автомата. Произведение автоматов. Замкнутость класса конечно-автоматных языков
относительно теоретико-множественных операций
Ключевые слова: конечные, автомат, функция выходов, множество принимающих (допускающих, заключительных) состояний, конечный автомат-преобразователь, входной алфавит, алфавит, начальное состояние, функция переходов, пара функций, список, диаграмма автомата, слово, входной, сумматор, выход, множество состояний, сложение, Конкатенация слов, язык, распознаватель, конечный автомат-распознаватель, конфигурация автомата, транзитивное замыкание, язык, распознаваемый автоматом, эквивалентные автоматы, произведение автоматов, значение, команда, табличном задании функции, ребро, путь, метка, определение, отношение, класс, граф, эквивалентность, произвольное, отрезок, связь, множество заключительных состояний, анализ, управляющие
Переработка информации с помощью конечных автоматов
Конечные автоматы являются математической моделью устройств, перерабатывающих дискретную входную информацию в режиме "реального времени", т.е. в темпе ее поступления.
На такие устройства в последовательные дискретные моменты времени 1,2, ..., t, t+1,... поступают входные сигналы x(1),x(2), ..., x(t),x(t+1),... и в ответ на них автомат A вырабатывает выходные сигналы y(1) y(2), ..., y(t), y(t+1),.... Конечные автоматы характеризуются двумя особенностями.
-
Отсутствие предвосхищения: выходной сигнал y(t), выдаваемый автоматом в момент t, зависит лишь от полученных к этому времени входов x(1),x(2), ..., x(t), т.е. автомат не может предвосхитить будущие входы и заранее на них отреагировать. Таким образом, имеется некоторая функция выходов
 , определяющая очередной выход по предшествующему входу.
, определяющая очередной выход по предшествующему входу. -
Конечная память: в каждый момент t информация в автомате о полученном к этому моменту входе x(1),x(2), ..., x(t) конечна. Это свойство удобно интерпретировать следующим образом: автомат имеет конечное множество состояний Q и в каждый момент находится в одном из этих состояний. При получении очередного входа состояние может измениться. Таким образом, состояние
 , в котором находится автомат после получения входной последовательности x(1),x(2), ..., x(t), и представляет информацию об этой последовательности, используемую в дальнейшей работе автомата при определении следующего состояния и выхода.
, в котором находится автомат после получения входной последовательности x(1),x(2), ..., x(t), и представляет информацию об этой последовательности, используемую в дальнейшей работе автомата при определении следующего состояния и выхода.
Наше обсуждение приводит к следующему определению конечного автомата с выходом.
Определение 4.1. Конечный автомат - преобразователь - это система вида

включающая следующие компоненты:
-
 - конечное множество - входной алфавит ;
- конечное множество - входной алфавит ; -
 - конечное множество - выходной алфавит ;
- конечное множество - выходной алфавит ; - Q={q0, ... , qn-1} (n >= 1) - конечное множество - алфавит внутренних состояний;
-
 - начальное состояние автомата;
- начальное состояние автомата; -
 - функция переходов,
- функция переходов,  - это состояние, в которое переходит автомат из состояния q, когда получает на вход символ a ;
- это состояние, в которое переходит автомат из состояния q, когда получает на вход символ a ; -
 - функция выходов,
- функция выходов,  - это символ из
- это символ из  , который выдает на выход автомат в состоянии q, когда получает на вход символ a.
, который выдает на выход автомат в состоянии q, когда получает на вход символ a.
Иногда пару функций  называют программой автомата A и задают как
список из m n команд вида
называют программой автомата A и задают как
список из m n команд вида  .
.
Другой удобный способ задания функций  и
и  - табличный.
Каждая из них определяется таблицей
(матрицей) размера n x m, строки которой соответствуют состояниям из Q,
а столбцы - символам из входного алфавита
- табличный.
Каждая из них определяется таблицей
(матрицей) размера n x m, строки которой соответствуют состояниям из Q,
а столбцы - символам из входного алфавита  . В первой из них на пересечении строки qi и столбца aj стоит состояние
. В первой из них на пересечении строки qi и столбца aj стоит состояние  , а во второй - выходной символ
, а во второй - выходной символ  .
.
Еще один способ представления конечного автомата основан на использовании ориентированных размеченных графов.
Определение 4.2. Диаграмма автомата  - это
ориентированный (мульти) граф DA=(Q, E) с помеченными ребрами, в котором выделена вершина- начальное
состояние q0 и из каждой вершины
выходит
- это
ориентированный (мульти) граф DA=(Q, E) с помеченными ребрами, в котором выделена вершина- начальное
состояние q0 и из каждой вершины
выходит  ребер, помеченных парами символов
ребер, помеченных парами символов  .
Таким образом, для каждой и каждого символа
.
Таким образом, для каждой и каждого символа  имеется единственное ребро
с меткой
имеется единственное ребро
с меткой  из q в вершину
из q в вершину  .
.
Как автомат A перерабатывает входное слово x1x2 ... xt? Он начинает работу
в состоянии q(0)=q0. Затем, получив (прочитав) входной символ x1, переходит в состояние  и выдает символ
и выдает символ  . Далее, получив x2 A
переходит в состояние
. Далее, получив x2 A
переходит в состояние  и выдает символ
и выдает символ  и т.д. Таким образом, работа автомата,
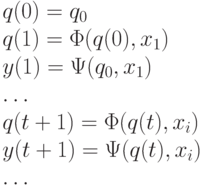
характеризуется последовательностью проходимых им состояний q(0), q(1), ... , q(t), ... и
последовательностью выходных символов y(1), ... , y(t), .... Они определяются следующими
реккурентными соотношениями:
и т.д. Таким образом, работа автомата,
характеризуется последовательностью проходимых им состояний q(0), q(1), ... , q(t), ... и
последовательностью выходных символов y(1), ... , y(t), .... Они определяются следующими
реккурентными соотношениями:
Рассмотрим несколько примеров автоматов-преобразователей.
Пример 4.1. Сумматор последовательного действия
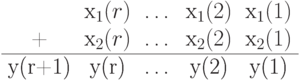
Мы уже строили схему из функциональных элементов SUMn, реализующую для фиксированного n суммирование двух n -разрядных двоичных чисел. Построим теперь конечный автомат SUM, который сможет складывать два двоичных числа произвольной разрядности. На вход этого автомата будут последовательно подаваться пары x(i)= (x1(i),x2(i)) соответствующих i -ых (1<= i <= r) разрядов двух двоичных чисел x1=x1(r) ... x1(2) x1(1) и x2=x2(r) ... x2(2) x2(1), а признаком завершения чисел будет служить символ x(r+1)= * (если одно из слагаемых короче другого, то будем считать, что недостающие разряды - нули). Выходом автомата должна быть последовательность (r+1) двоичных разрядов суммы y = x1 + x2:
Таким образом, входной алфавит автомата:  ,
а выходной алфавит:
,
а выходной алфавит:  .
Что нужно знать автомату SUM о первых i разрядах x1 и x2,
чтобы получив их (i+1) -ые разряды (x1(i+1),x2(i+1)), верно определить
выход y(i+1)? Ясно, что для этого достаточно знать, был ли перенос в i -ый
разряд. Поэтому можно зафиксировать множество состояний Q = {q0, q1},
в котором q0 означает, что переноса не было, а q1 - что перенос был.
Теперь легко построить таблицы, представляющие функции переходов и выходов автомата SUM.
.
Что нужно знать автомату SUM о первых i разрядах x1 и x2,
чтобы получив их (i+1) -ые разряды (x1(i+1),x2(i+1)), верно определить
выход y(i+1)? Ясно, что для этого достаточно знать, был ли перенос в i -ый
разряд. Поэтому можно зафиксировать множество состояний Q = {q0, q1},
в котором q0 означает, что переноса не было, а q1 - что перенос был.
Теперь легко построить таблицы, представляющие функции переходов и выходов автомата SUM.
| : |

|
(00) | (01) | (10) | (11) | * |
|---|---|---|---|---|---|---|
| q0 | q0 | q0 | q0 | q1 | q0 | |
| q1 | q0 | q1 | q1 | q1 | q0 | |
 : : |
|
(00) | (01) | (10) | (11) | * |
| q0 | 0 | 1 | 1 | 0 | 0 | |
| q1 | 1 | 0 | 0 | 1 | 1 |
Заметим, что после получения символа * автомат SUM переходит в начальное состояние q0 и готов выполнять сложение следующей пары чисел.
На диаграмме автомата у вершины q0 четыре петли, а у вершины q1 - три, объединены в одну с четырьмя и тремя метками, соответственно. Точно так же слиты два ребра из q1 в q0. Стрелкой указано начальное состояние.