
| Россия |
Инспектор
Вы можете этот курс.
Опубликован: 27.07.2006 | Уровень: специалист | Доступ: платный
Лекция 7:
Стохастические методы обучения нейронных сетей
Аннотация: В лекции дается обзор основных стохастических методов, используемых для обучения нейронных сетей: метод отжига металла, больцмановское обучение, обучение Коши, метод искусственной теплоемкости.
Ключевые слова: стохастические методы обучения, искусственный нейрон, локальные минимумы, искусственные нейронные сети, множества, персептрон, сеть, выход, целевая функция, ловушка, вес, ПО, значение, критическая точка, размер шага, минимум, отжиг металла, физическая система, энергия, вероятность, больцмановское обучение, входной, вектор, гауссовское распределение, интеграл, машины Больцмана, сходимость, функция, вывод, распределение Коши, дисперсия, метод Монте-Карло, улучшение, искусственная теплоемкость, средняя величина, алгоритм, коррекция, алгоритм обратного распространения, эвристика, паралич, уравнениями в частных производных, обучение Коши, область определения
Стохастические методы полезны как для обучения искусственных нейронных сетей, так и для получения выхода от уже обученной сети. Стохастические методы обучения приносят большую пользу, позволяя исключать локальные минимумы в процессе обучения. Но с ними также связан ряд проблем.
Использование обучения
Искусственная нейронная сеть обучается с помощью некоторого процесса, модифицирующего ее веса. Если обучение успешно, то предъявление сети множества входных сигналов приводит к появлению желаемого множества выходных сигналов. Имеется два класса обучающих методов: детерминистский и стохастический.
Детерминистский метод обучения шаг за шагом осуществляет процедуру коррекции весов сети, основанную на использовании их текущих значений, а также величин входов, фактических выходов и желаемых выходов. Обучение персептрона является примером подобного детерминистского метода.
Стохастические методы обучения выполняют псевдослучайные изменения величин весов, сохраняя те изменения, которые ведут к улучшениям. Чтобы показать это наглядно, рассмотрим рис. 7.1, на котором изображена типичная сеть, где нейроны соединены с помощью весов. Выход нейрона является здесь взвешенной суммой его входов, которая преобразована с помощью нелинейной функции. Для обучения сети могут быть использованы следующие процедуры:
- Выбрать вес случайным образом и подкорректировать его на небольшое случайное число. Предъявить множество входов и вычислить получающиеся выходы.
- Сравнить эти выходы с желаемыми выходами и вычислить величину разности между ними. Общепринятый метод состоит в нахождении разности между фактическим и желаемым выходами для каждого элемента обучаемой пары, возведение разностей в квадрат и нахождение суммы этих квадратов. Целью обучения является минимизация этой разности, часто называемой целевой функцией.
- Выбрать вес случайным образом и подкорректировать его на небольшое случайное значение. Если коррекция помогает (уменьшает целевую функцию), то сохранить ее, в противном случае вернуться к первоначальному значению веса.
- Повторять шаги с 1 по 3 до тех пор, пока сеть не будет обучена в достаточной степени.
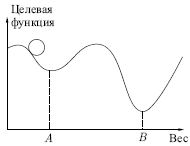
Этот процесс стремится минимизировать целевую функцию, но может
попасть, как в ловушку, в неудачное решение. На рис. 7.2 показано, как
это может происходить в системе с единственным весом. Допустим, что
первоначально вес взят равным значению в точке  Если случайные
шаги
по весу малы, то любые отклонения от точки
Если случайные
шаги
по весу малы, то любые отклонения от точки  увеличивают целевую
функцию и будут отвергнуты. Лучшее значение веса, принимаемое в
точке
увеличивают целевую
функцию и будут отвергнуты. Лучшее значение веса, принимаемое в
точке  , никогда не будет найдено, и система будет поймана в
ловушку
локальным минимумом вместо глобального минимума в точке
, никогда не будет найдено, и система будет поймана в
ловушку
локальным минимумом вместо глобального минимума в точке  Если же
случайные коррекции веса очень велики, то как точка , так и
точка
будут часто посещаться, но то же самое будет верно и для каждой другой
точки. Вес будет меняться так резко, что он никогда не установится в
желаемом минимуме.
Если же
случайные коррекции веса очень велики, то как точка , так и
точка
будут часто посещаться, но то же самое будет верно и для каждой другой
точки. Вес будет меняться так резко, что он никогда не установится в
желаемом минимуме.