


|
В уравнениях движения кривошипно-шатунного механизма вместо обозначения радиуса кривошипа "r" ошибочно записан символ "?" (гамма). P.S. Может быть это слишком очевидно, но не упомянуто, что угол поворота кривошипа ? считается малым. |
Инспектор
Вы можете этот курс.
Опубликован: 15.03.2007 | Уровень: специалист | Доступ: платный | ВУЗ: Донецкий национальный технический университет
Лекция 4:
Численные методы решения нелинейных уравнений
Метод Ньютона (метод касательных)
Рассмотренные ранее методы решения нелинейных уравнений являются методами прямого поиска. В них для нахождения корня используется нахождение значения функции в различных точках интервала [a,b].
Метод Ньютона относится к градиентным методам, в которых для нахождения корня используется значение производной.
Дано нелинейное уравнение:
f(x)=0
Найти корень на интервале [a,b] с точностью  .
.
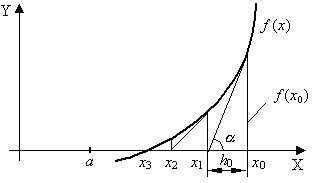
Метод Ньютона основан на замене исходной функции f(x), на каждом шаге поиска касательной, проведенной к этой функции. Пересечение касательной с осью Х дает приближение корня (Рис. 4.8).
Выберем начальную точку x0=b (конец интервала изоляции). Находим значение функции в этой точке и проводим к ней касательную, пересечение которой с осью Х дает нам первое приближение корня x1.
x1 = x0 – h0,
где

Поэтому

В результате итерационный процесс схождения к корню реализуется рекуррентной формулой
 |
( 4.6) |
Процесс поиска продолжаем до тех пор, пока не выполнится условие:
 |
( 4.7) |
Упростим условие (4.7), исходя из (4.6). Получим:
 |
( 4.8) |
Метод обеспечивает быструю сходимость, если выполняется условие:
 |
( 4.9) |
т.е. первую касательную рекомендуется проводить в той точке интервала [a,b], где знаки функции f(x0) и ее кривизны f"(x0) совпадают.
Схема алгоритма уточнения корня метод Ньютона приведена на рис. 4.9
Модифицированный метод Ньютона (метод секущих)
В этом методе для вычисления производных на каждом шаге поиска используется численное дифференцирование по формуле:
Тогда рекуррентная формула (4.6) будет иметь вид:
 |
( 4.10) |
где 
Метод хорд
Метод основан на замене функции f(x) на каждом шаге поиска хордой, пересечение которой с осью Х дает приближение корня.
При этом в процессе поиска семейство хорд может строиться:
а) при фиксированном левом конце хорд, т.е. z=a, тогда начальная точка х0=b (рис. 4.10а);
б) при фиксированном правом конце хорд, т.е. z=b, тогда начальная точка х0=a (рис. 4.10б);
В результате итерационный процесс схождения к корню реализуется рекуррентной формулой:
для случая а)
 |
( 4.11) |
для случая б)
 |
( 4.12) |
Процесс поиска продолжается до тех пор, пока не выполнится условие
 |
( 4.13) |
Метод обеспечивает быструю сходимость, если f(z)f"(z) > 0, т.е. хорды фиксируются в том конце интервала [a,b], где знаки функции f(z) и ее кривизны f"(z) совпадают.
Схема алгоритма уточнения корня методом хорд представлена на рис. 4.11.
Равиль Султанов