![F \subseteq [F]](/sites/default/files/tex_cache/db76450c14ac2abb88617f602098d474.png) .
.![F \subseteq G \Rightarrow [F] \subseteq [G]](/sites/default/files/tex_cache/e7b81aa88503c0ad4937fac9b9c3f9ab.png) .
.![F \subseteq [G]](/sites/default/files/tex_cache/be35d6951d84c9591e4171fe543e0d89.png) , то и система
, то и система  и
и |
Это в лекции 3. |
Тверской государственный университет
Опубликован: 21.08.2007 | Доступ: свободный | Студентов: 1 / 0 | Оценка: 4.08 / 3.92 | Длительность: 15:40:00
ISBN: 978-5-9556-0110-6
Специальности: Программист, Математик
Теги:
Лекция 5:
Полные системы функций и теорема Поста
Аннотация: Замкнутые классы функций. Полные системы булевых функций.
Замкнутость классов функций, сохраняющих 0, функций, сохраняющих 1,
самодвойственных функций, монотонных функций и линейных функций.
Критерий полноты системы булевых функций (теорема Поста)
Ключевые слова: булева функция, КНФ, полная система функций, ПО, Замыкание системы функций, определение, замыкание, замыкание системы функций, функция, суперпозиция, пункт, полнота, Законы де Моргана, штрих Шеффера, Замкнутая система функций, замкнутая система, индекс, класс, функция сохраняющая 0, функция сохраняющая 1, самодвойственная функция, линейная функция, многочлен Жегалкина, монотонная функция, многочлен, базис индукции, переменная, коэффициенты, (Теорема Поста о полноте), константы, отрицание, место, равенство, подстановка, координаты, базис, значение, стрелка Пирса, полнота системы функций, импликация, представление
Замкнутые классы функций
Пусть  - это множество всех
булевых функций. В предыдущем разделе мы установили, что любую функцию из
- это множество всех
булевых функций. В предыдущем разделе мы установили, что любую функцию из  можно задать формулой над системой
можно задать формулой над системой  (в качестве таких формул можно,
например, взять соответствующие ДНФ и КНФ). Такие системы функций называются полными.
(в качестве таких формул можно,
например, взять соответствующие ДНФ и КНФ). Такие системы функций называются полными.
Определение 5.1. Система булевых функций F
называется полной,если формулами над этой системой можно задать
любую булеву функцию из .
Другим уже известным нам примером полной системы функций является система FJ={ 0, 1, *, +}, позволяющая задать произвольную булеву
функцию с помощью многочлена Жегалкина. Разумеется, не всякая система является
полной. Например, формулами над системой  невозможно
выразить функцию тождественно равную 0 (почему?).Наша цель в этом разделе - найти критерий, позволяющий
по системе функций
определять ее полноту.
невозможно
выразить функцию тождественно равную 0 (почему?).Наша цель в этом разделе - найти критерий, позволяющий
по системе функций
определять ее полноту.
Для исследования полноты полезно следующее понятие.
Определение 5.2. Замыкание [F] системы функций F - это множество всех функций, которые можно задать с помощью формул над F .
Тогда определение полной системы можно переформулировать так:
система F является полной тогда и только тогда, когда ![[F] = \mathbf{P}](/sites/default/files/tex_cache/5d930636e9f73808ab8050fd241dd05c.png) .
.
Замыкание обладает следующими основными свойствами.
Предложение 5.1.
Доказательство. Все эти утверждения достаточно просто следуют из определения замыкания. Например, справедливость пункта (2) следует из того, что всякая функция из [F] задается некоторой формулой над F, а тогда всякая функция из [[F]], которая задается суперпозицией функций из [F], задается также некоторой формулой над F. Пункт (3) очевиден, а пункт (4) следует из (2) и (3):
![F \subseteq [G] \Rightarrow [F] \subseteq [[G]] \Rightarrow [F] \subseteq [G]](/sites/default/files/tex_cache/ef2b47c4de2cc866969d153d721963f3.png) и так как ,
то и
и так как ,
то и ![[G] = \mathbf{P}](/sites/default/files/tex_cache/74dfea5e9d68c4291b7a5d4145a9db9b.png) .
.
Утверждение (4) позволяет устанавливать полноту некоторой системы, выражая с ее помощью все функции другой системы, полнота которой уже установлена.
Например, законы де Моргана позволяют выразить  через пару
через пару  ,
, 
 и
и  - через пару ,
- через пару , 
 . Поэтому каждая из систем
. Поэтому каждая из систем  и
и  также является полной. Эквивалентности (7) и (8) позволяют выразить через пару ,
также является полной. Эквивалентности (7) и (8) позволяют выразить через пару , 
 .
Следовательно, полной будет и система
.
Следовательно, полной будет и система  .
.
Имеются ли полные системы из одной двуместной функции? Да. Рассмотрим
систему, { | }, включающую лишь штрих Шеффера. Напомним, что  . Тогда нетрудно проверить, что
. Тогда нетрудно проверить, что  и
и  . Следовательно, система { | } полная.
. Следовательно, система { | } полная.
Определение 5.3. Система функций F называется замкнутой, если F = [F] .
Очевидно, что замкнутая система F, не содержащая всех функций
из , не является полной.
Далее в этом разделе мы будем использовать верхний индекс в круглых скобках
Для указания числа аргументов функции, т.е. f(n) означает, что  .
.
Определим пять важных замкнутых систем.
Определение 5.4.
(1,2) Функция  сохраняет 0 (сохраняет 1),если f(0,0,...
,0)=0 ( f(1,1,...,1) = 1 ). Класс всех функций, сохраняющих 0, обозначим через
сохраняет 0 (сохраняет 1),если f(0,0,...
,0)=0 ( f(1,1,...,1) = 1 ). Класс всех функций, сохраняющих 0, обозначим через  ,
а класс всех функций, сохраняющих 1, - через
,
а класс всех функций, сохраняющих 1, - через  .
.
(3) Функция называется самодвойственной, если для любого набора аргументов  имеет место равенство:
имеет место равенство:

Таким образом, самодвойственные функции принимают на противоположных наборах
противоположные значения. Класс всех самодвойственных функций обозначим через  .
.
(4) Функция называется линейной, если она может
быть задана линейным многочленом Жегалкина вида

где  при i=0, 1, 2, ..., n.
при i=0, 1, 2, ..., n.
Класс всех линейных функций обозначим через  .
.
(5) Функция называется монотонной, если для любых
двух наборов аргументов  и
и  таких, что для всех
таких, что для всех ![j \in [1,n]](/sites/default/files/tex_cache/43744c20e46fb701151e3826dc547bc7.png)
 , имеет место неравенство
, имеет место неравенство

Класс всех монотонных функций обозначим через  .
.
Пример 5. Рассмотрим для примера пять функций от 3-х переменных, которые представлены в следующей таблице.
| X1 | X2 | X3 | f1 | f2 | f3 | f4 | f5 |
|---|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 |
| 0 | 0 | 1 | 0 | 1 | 0 | 1 | 0 |
| 0 | 1 | 0 | 0 | 0 | 1 | 1 | 1 |
| 0 | 1 | 1 | 1 | 0 | 0 | 0 | 1 |
| 1 | 0 | 0 | 1 | 0 | 1 | 1 | 0 |
| 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| 1 | 1 | 0 | 0 | 1 | 1 | 0 | 1 |
| 1 | 1. | 1 | 0 | 1 | 1 | 1 | 1 |
Из определений непосредственно следует, что f3, f4 и f5
сохраняют 0, т.е. входят в , а функции f2, f3, f4
и f5 сохраняют 1, т.е. входят в . Функция f3 является самодвойственной, а f2 - нет, так как f2(0,0,0) = f2(1,1,1). Функция f2 является линейной - она задается многочленом X1 + X2 +1. Функция f5
является монотонной, а f3 - нет, так как f3(0,1,1)=0 < 1=f3(0,1,0).
Теорема 5.1. Классы  и являются замкнутыми.
и являются замкнутыми.
Доказательство. Замкнутость всех указанных классов устанавливается индукцией по построению
формул. Пусть  и
и ![f \in [F]](/sites/default/files/tex_cache/2b730aa05cf04a59f3f94dfa67b5d483.png) задается некоторой формулой над F.
Нужно показать, что тогда
задается некоторой формулой над F.
Нужно показать, что тогда  .
.
Базис индукции, когда эта формула есть переменная  ,
очевиден.
,
очевиден.
Пусть f(X1, ..., Xk)= g(f1(X1, ..., Xk),
..., fn(X1, ..., Xk)),
и функции  входят в F.
Требуется показать, что тогда и f входит в F.
входят в F.
Требуется показать, что тогда и f входит в F.
Для  это просто:
это просто:

Аналогично проверяется случай  .
.
Если  и
и  - произвольный набор аргументов, то
- произвольный набор аргументов, то
Следовательно,  .
.
Пусть  . Так как тогда g(n) и все
. Так как тогда g(n) и все  линейны, то существуют коэффициенты
линейны, то существуют коэффициенты  и
и  такие, что
такие, что  и
и  .
.
Подставив эти выражения в формулу для  , получим
, получим
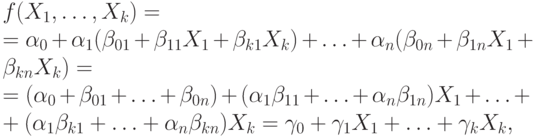
где  - значения
сумм констант в соответствующих скобках.
- значения
сумм констант в соответствующих скобках.
Следовательно,  .
.
Наконец рассмотрим класс монотонных функций. Если  и все
и все  и
и  и
и  - два набора аргументов такие, что для всех
- два набора аргументов такие, что для всех ![j \in [1,k] \sigma _{j} \ge \rho _{j}](/sites/default/files/tex_cache/7e4b53cc9246ca3a8c37467e328b23e5.png) , то
, то

и поэтому
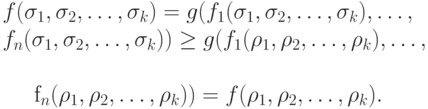
Таким образом,  .
.
Татьяна Дембелова
|
Почему в вводной лекции курса Основы дискретной математики одним из свойств отношения частичного порядка упоминается антирефлексивность? Посмотрела в других источниках, там -0 рефлексивность... http://ru.wikipedia.org/wiki/%D0%9E%D1%82%D0%BD%D0%BE%D1%88%D0%B5%D0%BD%D0%B8%D0%B5_%D0%BF%D0%BE%D1%80%D1%8F%D0%B4%D0%BA%D0%B0 |