|
Подскажите, пожалуйста, планируете ли вы возобновление программ высшего образования? Если да, есть ли какие-то примерные сроки? Спасибо! |
Опубликован: 02.12.2011 | Уровень: специалист | Доступ: свободно
Лекция 6:
Координатные преобразования в OpenGL
Проекционные преобразования
Проекционные преобразования определяются матрицей проекции и выполняются после видовых преобразований ( рис. 5.3).
Матрица проекции выполняет несколько функций:
- Ограничивает область видимости объемной сцены. Для этого в командах Ortho и Frustum в качестве параметров передаются три пары координат для трех осей координат. С ограничением области вывода неразрывно связана операция усечения координат. Результатом этого преобразования является преобразование координат вершин видимой области сцены для каждой из осей координат, таким образом, чтобы они находились в интервале от –1 до 1.
- Определяет перспективные преобразования.
- Выполняет преобразование мировой (правосторонней) системы координат ( рис. 5.1) в видовую (левостороннюю) систему координат ( рис. 5.2). Преобразование заключается в изменении направления оси OZ на противоположное.
Результатом умножения видовых координат вершин на матрицу проекций является получение усеченных координат вершин видимой области, лежащих в интервале от -1 до 1 для каждой из осей координат.
Параллельная проекция
Для формирования матрицы параллельной проекции используется команда
Ortho(l, r, b, t, n, f: GLdouble)
Команда имеет шесть параметров. Каждая пара параметров определяет координаты границ области видимости для каждой из осей координат:
l, r – левая и правая границы области видимости вдоль оси OX;
b, t – нижняя и верхняя границы области видимости вдоль оси OY;
n, f – ближняя и дальняя границы области видимости вдоль оси OZ.
Фактически параметры команды определяют расположение граничных плоскостей, ограничивающих видимую область пространства.
Команда Ortho формирует матрицу:
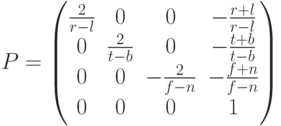
Диагональные элементы матрицы  выполняют усечение каждой из осей координат в соответствии с границами области видимости, определяемой командой Ortho. В результате координаты видимой области находятся в интервале [-1;1] для каждой из осей. Поэтому диагональные элементы имеют вид дроби с числом 2 в качестве числителя (длина области видимости в усеченных координатах) и знаменателя, который равен длине области видимости в мировых координатах.
выполняют усечение каждой из осей координат в соответствии с границами области видимости, определяемой командой Ortho. В результате координаты видимой области находятся в интервале [-1;1] для каждой из осей. Поэтому диагональные элементы имеют вид дроби с числом 2 в качестве числителя (длина области видимости в усеченных координатах) и знаменателя, который равен длине области видимости в мировых координатах.
Элемент  в третьем столбце матрицы имеет отрицательный знак для изменения направления оси OZ на противоположное, и преобразует мировую систему координат в видовую.
в третьем столбце матрицы имеет отрицательный знак для изменения направления оси OZ на противоположное, и преобразует мировую систему координат в видовую.
Элементы матрицы четвертого столбца переносят изображение в центр системы координат с учётом усечения координат.
Центр сцены для параллельной проекции имеет координаты:

Формируемая командой Ortho матрица ( ) умножается на текущую матрицу (M
) умножается на текущую матрицу (M результирующая матрица (
результирующая матрица ( ) заменяет текущую матрицу:
) заменяет текущую матрицу:

Перспективная проекция
Для задания центральной перспективной проекции в OpenGL используется команда Frustum:
Frustum (l, r, b, t, n, f: GLdouble);
Команда Frustum имеет шесть параметров, которые определяют граничные координаты области видимости:
- l, r – левая и правая границы области видимости вдоль оси OX;
- b, t – нижняя и верхняя границы области видимости вдоль оси OY;
- n, f – ближняя и дальняя границы области видимости вдоль оси OZ.
Ближняя граница оси OZ (параметр n) так же определяет положение плоскости проекции, которая располагается перпендикулярно оси OZ.
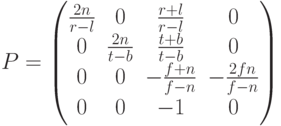
Точка наблюдения находится в начале координат. Видимый объем представляет собой усеченную пирамиду, проекция видимой области формируется на плоскости усечения, перпендикулярной оси OZ. Значения l, r, b, t задаются для ближней к наблюдателю плоскости отсечения. Значения n и f должны быть положительными.
Команда Frustum формирует матрицу ():
При выполнении команды Frustum матрица перспективной проекции () умножается на текущую матрицу ( ), и результирующая матрица () замещает текущую матрицу:
), и результирующая матрица () замещает текущую матрицу:
Центр сцены имеет координаты:

После умножения на матрицу проекции координаты вершин будут в интервале [-1,1] для всех осей координат.
Эффект перспективы зависит от расстояния ближней плоскости до наблюдателя. Чем ближе плоскость проекции расположена к точке наблюдения, тем больше эффект перспективы.
Определение области вывода
На последнем этапе координатных преобразований вычисляются координаты области вывода. Координаты области вывода определяются с помощью команды:
Viewport (x,y: GLint; w, h: GLsizei);
Команда имеет четыре параметра:
- x, y – координаты верхнего левого угла области вывода;
- w, h – ширина и высота области вывода.
Оконные координаты проекции вычисляются как
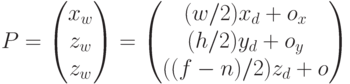
где  – координаты центра области вывода изображения:
– координаты центра области вывода изображения:

Владислав Нагорный
Лариса Парфенова
|
1) Можно ли экстерном получить второе высшее образование "Программная инженерия" ? 2) Трудоустраиваете ли Вы выпускников? 3) Можно ли с Вашим дипломом поступить в аспирантуру?
|